描述:机器人的急停功能至关重要。急停按钮被按下时,能迅速切断机器人动力,使其立即停止动作。通过正确接线和设置,确保在紧急状况下快速响应,保障人员和设备安全,是机器人系统不可或缺的安全保障措施。 | | |
|---|
| | 常规模式安全保护停止,在任何模式下均有效,在自动和手动模式下都有效,主要由安全设备激活,例如光栅、安全光幕、安全垫等 |
| | 自动模式安全保护停止,在自动模式下有效,用于在自动程序执行过程中被外在检测装置激活的安全机制,如门互锁开关、光束或敏感的垫等 |
| | 上级安全保护停止,在任何模式下均有效,具有一般停止的功能,但是主要用于外部设备的连接 |
| | 紧急停止,无论机器人处于何种状态,一旦紧急信号激活,机器人将立即处于停止状态,且在报警没有消除的状态下,机器人无法启动。紧急停止需要在很紧急情况下才能使用,不正确地使用紧急停止可能会缩短机器人的使用寿命 |
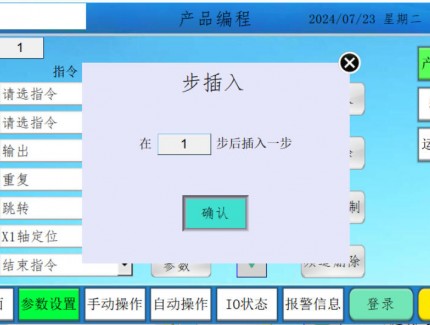
X1-3和X1-4断开后,机器人进入急停状态,X1-1和X1-2的NC触点断开X2-3和X2-4断开后,机器人进入急停状态,X2-1和X2-2的NC触点断开X5-11和X5-12断开后,机器人进入自动停止状态

 客服热线:
客服热线: